Veiktspējas optimizēšana ar MPU-6050: iestatīšana, kalibrēšana un lietojumprogrammas
2024-04-25
9247
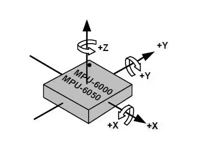
MPU-6050 ir pasaulē pirmais integrētais 6 asu kustības apstrādes komponents, kas integrē 3 asu žiroskopu, 3 asu akselerometru un mērogojamu digitālās kustības procesoru (DMP).Tā izmantošanas mērķis ir iegūt izmērāmā objekta slīpuma leņķi (piemēram, kvadriciklu, balansējošu automašīnu) uz x, y un z asīm, tas ir, piķa leņķi, ripošanas leņķi un žokļa leņķi.Izmantojot I2C interfeisu, mēs izlasījām sešus MPU-6050 (trīs asu paātrinājuma AD vērtības un trīs asu leņķa ātruma AD vērtības) datus.Pēc pozas saplūšanas apstrādes var aprēķināt soli, rullīti un žokļa leņķus.As a directional reference for measurement values, the definition of the sensor coordinate direction is as shown in the figure below, which follows the principle of the right-handed coordinate system (that is, the right thumb points to the positive direction of the x-Axis, rādītājpirksts norāda uz Y ass pozitīvo virzienu un vidējais pirksts norāda uz Z-ass pozitīvo virzienu).
Katalogs
Ar savu speciālo I2C sensora kopni MPU-6050 var saņemt ievadi tieši no ārēja 3 asu kompasa, nodrošinot pilnu 9 asu kustībuFusion ™ izvadi.Tas novērš neatbilstības problēmu starp kombinēto žiroskopu un akseleratora laika grafiku un ievērojami samazina iepakojuma vietu, salīdzinot ar daudzkomponentu risinājumiem.Kad MPU-60X0 ir savienots ar trīs ass magnetometru, tas spēj nodrošināt pilnu 9 asu kustības saplūšanas izvadi tā galvenajam I2C vai SPI porcijai (ņemiet vērā, ka SPI ports ir pieejams tikai MPU-6000).
Alternatīvas un ekvivalenti
- MPU-3300
- MPU-6000
- MPU-6500
MPU-6050 ražotājs
MPU-6050 ražotājs ir TDK.Pēc diviem TDK dibinātājiem Dr. Yogoro Kato un Takei Takei, izgudroja Ferrītu Tokijā, viņi nodibināja Tokijas Denkikagaku Kogyo K.K.1935. gadā kā globāls elektronikas nozares zīmols, TDK vienmēr ir saglabājis dominējošo stāvokli elektronisko izejvielu un elektronisko komponentu laukos.TDK visaptverošais un inovācijas balstītais produktu portfelis aptver pasīvos komponentus, piemēram, keramikas kondensatorus, alumīnija elektrolītiskos kondensatorus, plēves kondensatorus, magnētiskos produktus, augstfrekvences komponentus, pjezoelektriskās un aizsardzības ierīces, kā arī sensorus un sensoru sistēmas (piemēram, temperatūru un spiedienu,magnētiskie un MEMS sensori) utt. Turklāt TDK nodrošina arī barošanas avotus un enerģijas ierīces, magnētiskās galvas un citus produktus.Tās produktu zīmolos ietilpst TDK, EPCO, Invencese, Micronas, Tronics un TDK-Lambda.
MPU-6050 iekšējā bloka diagramma
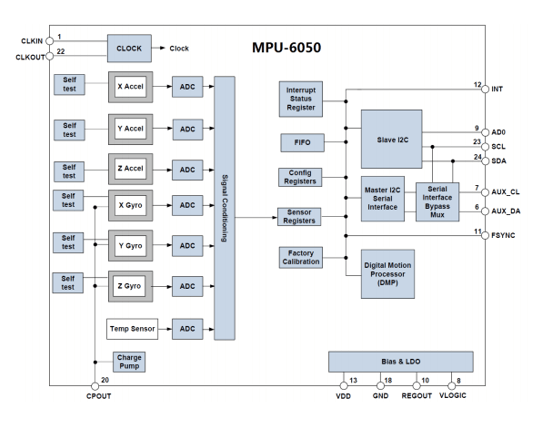
Starp tiem SCL un SDA ir IIC saskarnes, kas savienotas ar MCU, un MCU kontrolē MPU-6050 caur šo IIC saskarni.Ir arī IIC saskarne, proti, Aux_cl un Aux_da.Šo saskarni var izmantot, lai savienotu ārējās vergu ierīces, piemēram, magnētiskos sensorus, lai izveidotu deviņu asu sensoru.Vlogic ir IO porta spriegums.Šī tapa var atbalstīt vismaz 1,8 V.Mēs parasti to tieši savienojam ar VDD.AD0 ir vergu IIC interfeisa adrešu vadības tapa (savienots ar MCU).Šis PIN kontrolē zemāko IIC adreses daļu.Ja tas ir savienots ar GND, MPU-6050 IIC adrese ir 0x68;Ja tas ir savienots ar VDD, tas ir 0x69.Lūdzu, ņemiet vērā, ka šeit adrese neietver zemāko datu pārraides daļu (zemākais bits tiek izmantots, lai attēlotu lasīšanas un rakstīšanas operācijas).Uz MWBalancedStc15 AD0 ir savienots ar GND, tāpēc MPU-6050 IIC adrese ir 0x68 (izņemot zemāko bitu).
Inicializējiet IIC interfeisu
MPU-6050 izmanto IIC, lai sazinātos ar STC15, tāpēc mums vispirms jāinicializē SDA un SCL datu līnijas, kas savienotas ar MPU-6050.
Atiestatīt MPU-6050
Šis solis atjauno visus reģistrus MPU-6050 iekšpusē līdz to noklusējuma vērtībām, kas tiek sasniegti, rakstot 1 līdz Bit7 no Power Management Register 1 (0x6b).Pēc atiestatīšanas Power Management Register 1 tiks atjaunots noklusējuma vērtībā (0x40), un šis reģistrs pēc tam jānosaka uz 0x00, lai pamodinātu MPU-6050 un novietotu to normālā darba stāvoklī.
Iestatiet leņķiskā ātruma sensora (žiroskopa) un paātrinājuma sensora pilna mēroga diapazonu
Šajā posmā mēs ar žiroskopa konfigurācijas reģistra (0x1b) un paātrinājuma sensoru konfigurācijas reģistra (0x1C) un paātrinājuma sensoru konfigurācijas reģistra (0x1C) un paātrinājuma sensoru konfigurācijas reģistra (0x1C) iestatām pilna mēroga diapazonu (FSR).Parasti žiroskopa pilna mēroga diapazonu mēs iestatām uz ± 2000 DPS un akselerometra pilna mēroga diapazonu uz ± 2G.
Iestatiet citus parametrus
Šeit mums arī jākonfigurē šādi parametri: izslēgt pārtraukumus, jāatspējo Aux I2C interfeiss, atspējot FIFO, iestatiet žiroskopa paraugu ņemšanas ātrumu un konfigurējiet digitālo zemas caurlaidības filtru (DLPF).Tā kā mēs neizmantojam pārtraukumus, lai lasītu datus šajā nodaļā, pārtraukšanas funkcija ir jāizslēdz.Tajā pašā laikā, tā kā mēs neizmantojam Aux I2C interfeisu, lai savienotu citus ārējos sensorus, mums arī ir jāaizver šī saskarne.Šīs funkcijas var kontrolēt, izmantojot pārtraukuma iespējošanas reģistru (0x38) un lietotāja vadības reģistru (0x6a).MPU-6050 var izmantot FIFO, lai saglabātu sensoru datus, bet mēs to neesam izmantojuši šajā nodaļā, tāpēc visi FIFO kanāli ir jāaizver.To var kontrolēt, izmantojot FIFO Enable Register (0x23).Pēc noklusējuma šī reģistra vērtība ir 0 (tas ir, FIFO ir atspējots), tāpēc mēs varam tieši izmantot noklusējuma vērtību.Žiroskopa paraugu ņemšanas ātrumu kontrolē paraugu ņemšanas ātruma dalītāja reģistrs (0x19).Parasti šo paraugu ņemšanas ātrumu mēs iestatām uz 50. Digitālā zemas caurlaides filtra (DLPF) konfigurācija tiek pabeigta caur konfigurācijas reģistru (0x1a).Vispārīgi runājot, mēs iestatīsim DLPF uz pusi no joslas platuma, lai līdzsvarotu datu precizitāti un reakcijas ātrumu.
Konfigurējiet sistēmas pulksteņa avotu un iespējojiet leņķa ātruma sensoru un paātrinājuma sensoru
Sistēmas pulksteņa avota iestatīšana ir atkarīga no strāvas pārvaldības reģistra 1 (0x6b), kur šī reģistra zemākie trīs biti nosaka pulksteņa avota izvēli.Pēc noklusējuma šie trīs biti ir iestatīti uz 0, kas nozīmē, ka sistēma kā pulksteņa avotu izmanto iekšējo 8MHz RC oscilatoru.Tomēr, lai uzlabotu pulksteņa precizitāti, mēs to bieži iestatām uz 1 un kā pulksteņa avotu atlasām X-ass žiroskopa PLL.Turklāt svarīgs solis inicializācijas procesā ir arī leņķa ātruma sensora un paātrinājuma sensora iespējošana.Abas operācijas tiek ieviestas, izmantojot Power Management Register 2 (0x6C).Vienkārši iestatiet atbilstošo bitu uz 0, lai aktivizētu atbilstošo sensoru.Pēc iepriekšminēto darbību pabeigšanas MPU-6050 var ievadīt parasto darba statusu.Tie reģistri, kas nav īpaši iestatīti, pieņems noklusējuma vērtības, kuras iestatīs sistēma.
Kā darbojas MPU-6050?
Žiroskopis
Sensors ir aprīkots ar žiroskopu, kas vienmēr būs paralēli sākotnējam virzienam žiroskopiskā efekta dēļ.Tāpēc mēs varam aprēķināt rotācijas virzienu un leņķi, nosakot žiroskopu no sākotnējā virziena.
Akselerometra sensors
Akselerometra sensors ir ierīce, kas var izmērīt paātrinājumu, un tā darbojas, pamatojoties uz pjezoelektriskā efekta principu.Paātrinājuma laikā sensors mēra inerciālo spēku, kas pielietots masu blokam, un pēc tam aprēķina paātrinājuma vērtību, izmantojot Ņūtona otro likumu.
Digitālā kustības procesors (DMP)
DMP ir datu apstrādes modulis MPU6050 mikroshēmā, kurai ir iebūvēts Kalmana filtrēšanas algoritms datu iegūšanai no žiroskopa un akselerometra sensoriem un izvades kvartjonu apstrādei.Šī funkcija ievērojami samazina perifēro mikroprocesora darba slodzi un izvairās no nogurdinošā filtrēšanas un datu saplūšanas procesa.
Piezīmes:
Quaternions: Quaternions ir vienkārši superkompleksa skaitļi.Sarežģītus skaitļus veido reāli skaitļi, kā arī iedomātā vienība I, kur i^2 = -1.
Kur tiek izmantots MPU-6050?
- Rotaļlietas
- klausule un pārnēsājamas spēles
- Spēļu kontrolieri, kas balstīti uz kustību
- BlurFree ™ tehnoloģija (video/nekustīga attēla stabilizēšanai)
- Airsign ™ tehnoloģija (drošībai/autentifikācijai)
- Instantgesture ™ IG ™ žestu atpazīšana
- Valkājami sensori veselības, fitnesa un sportu
- Spēļu un lietojumprogrammu ietvars ar kustību
- MotionCommand ™ tehnoloģija (žestu īsiem griezumiem)
- uz atrašanās vietu balstīti pakalpojumi, interešu punkti un mirušas rēķināšanas
- 3D tālvadības pults ar internetu savienotu DTV un iestatiet augšējās lodziņus, 3D peles
- Touchanywhere ™ tehnoloģija (“bez pieskāriena” lietotāja saskarnes lietojumprogrammu vadības/navigācijas)
MPU-6050 pakete

Kā samazināt MPU-6050 troksni?
Mēs varam ņemt šādus veidus, kā samazināt MPU-6050 troksni.
Izmantojiet kalibrētus sensorus
MPU-6050 akselerometra un žiroskopa kalibrēšana var novērst pašu sensoru novirzi un kļūdu, tādējādi samazinot trokšņa iedarbību.Kalibrēšanas process parasti sastāv no diviem posmiem: statiskā kalibrēšana un kustības kalibrēšana.
Aparatūras filtrēšanas process
Filtra kondensatoru pievienošana MPU-6050 elektrības līnijai var samazināt barošanas avota trokšņa ietekmi uz sensoru.Tikmēr PCB izkārtojuma laikā mums jācenšas noturēt MPU-6050 prom no iespējamiem traucējumu avotiem, piemēram, augstfrekvences signāla līnijām un lieljaudas komponentiem.
Programmatūras filtrēšana apstrāde
Pēc neapstrādātu datu apkopošanas no MPU-6050, mēs varam pievienot programmatūras filtrēšanas saiti, lai iepriekš apstrādātu sākotnējos datus, lai novērstu trokšņa izraisītus traucējumus.Parasti izmantotās programmatūras filtrēšanas metodes ietver vidējo filtrēšanu, vidējo filtrēšanu, Kalmana filtrēšanu un tā tālāk.
Izmantojiet iekšējo zemas caurlaides filtru
MPU-6050 ir iekšējs integrēts digitālais zemas caurlaides filtrs, ko var izmantot, lai samazinātu augstfrekvences troksni, iestatot tā nogriešanas frekvenci.Konkrēti, mēs varam iestatīt digitālā filtra robežas frekvenci, modificējot MPU-6050 konfigurācijas reģistru, lai novērstu augstfrekvences troksni, ko izraisa A/D paraugu ņemšana.
MPU-6050 balstīta kustības trajektorijas aprēķins
MPU-6050 ir sešu asu akselerometrs un žiroskopa sensors, ko var izmantot objektu kustības un attieksmes mērīšanai.Kustības trajektorijas aprēķinu, pamatojoties uz MPU-6050, var realizēt ar šādām darbībām:
Pirmais solis ir lasīt sensora datus.Mums jāizlasa akselerometra un žiroskopa dati no MPU-6050 sensoriem, izmantojot atbilstošas draiverus un bibliotēkas funkcijas.Šie dati parasti tiek izvadīti digitālā formātā, tāpēc ir nepieciešami daži konvertēšanas un kalibrēšanas darbi, lai tos pārveidotu par faktiskiem fizisko vienību mērījumiem.
Otrais solis ir paātrinājuma aprēķināšana.Pirmkārt, mums jāapstrādā dati no akselerometra, lai iegūtu objekta paātrinājumu katrā asī.Pēc tam, lai aprēķinātu objekta ātrumu un pārvietojumu katrā ass, mums jāintegrē paātrinājuma dati.Šajā procesā bieži tiek izmantotas skaitliskās integrācijas metodes, piemēram, Eulera metode vai Lunger-Kutta metode, lai nodrošinātu pārvietojuma aprēķinu precizitāti.
Trešais solis ir aprēķināt leņķisko ātrumu.Izmantojot žiroskopa datus, var aprēķināt objekta leņķisko ātrumu katrā ass.Atkal šie dati ir jākalibrē un jāpārveido, lai iegūtu leņķisko ātrumu faktiskajās fiziskajās vienībās.
Ceturtais solis ir aprēķināt rotāciju.Integrējot leņķiskā ātruma datus, var aprēķināt objekta rotācijas leņķi katrā ass.To var izdarīt, izmantojot skaitliskās integrācijas paņēmienus, piemēram, Eulera metodi vai ilgmūžīgu-Kutta metodi, lai aprēķinātu leņķi.
Piektais solis ir datu apvienošana.Mēs apvienojam akselerometru un žiroskopu datus, lai iegūtu pilnīgu attieksmi un objekta informāciju.To var izdarīt, izmantojot algoritmus, piemēram, uz kvantizāciju balstītu attieksmes risinātāju vai Eulera leņķa risinātāju.
Sestais solis ir rezultātu vizualizēt.Mēs pārveidojam aprēķināto objekta kustības trajektoriju par punktu kopumu 3D koordinātu sistēmā un parādām to, izmantojot atbilstošus vizualizācijas rīkus, lai intuitīvāk izprastu objekta kustības trajektoriju un attieksmes izmaiņas.
Bieži uzdotie jautājumi [FAQ]
1. Cik precīzs ir MPU6050?
Iegūtie rezultāti parādīja pietiekamu precizitāti mazāk nekā 1 % un uzticamību, nodrošinot lifta vārpstas pareizu izmēru un augstos lifta nozares standartus.
2. Kā lasīt datus no MPU6050?
Lai izlasītu iekšējos MPU6050 reģistrus, meistars nosūta sākuma nosacījumu, kam seko I2C vergu adrese un rakstīšanas bits, un pēc tam reģistrācijas adrese, kas tiks lasīta.
3. Kur tiek izmantots MPU6050?
Valkājamās veselības izsekošanas, fitnesa izsekošanas ierīcēs.Dronos un četrcopteros pozīcijas kontrolei izmanto MPU6050.Izmanto robotizētās rokas kontrolē.Rokas žestu kontroles ierīces.
4. Vai MPU6050 ir IMU?
MPU6050 IMU sensora bloks nolasa datus no MPU-6050 sensora, kas ir savienots ar aparatūru.Bloks izejas paātrinājums, leņķiskais ātrums un temperatūra gar sensora asīm.
5. Kāda ir MPU6050 apstrāde?
Šis ir MPU6050 borta procesors, kas apvieno datus, kas nāk no akselerometra un žiroskopa.DMP ir MPU6050 izmantošanas atslēga, un tas ir sīki paskaidrots vēlāk.Tāpat kā visiem mikroprocesoriem, DMP ir nepieciešama programmaparatūra, lai tā darbotos.
funkciju pārbaude.Augstākie rentablie produkti un labākais pakalpojums ir mūsu mūžīgā apņemšanās.
Karsts raksts
- Ir CR2032 un CR2016 maināmi
- MOSFET: definīcija, darba princips un atlase
- Releju uzstādīšana un pārbaude, releju elektroinstalācijas diagrammu interpretācija
- CR2016 pret CR2032 kāda ir atšķirība
- NPN pret PNP: Kāda ir atšķirība?
- ESP32 pret STM32: kurš mikrokontrollers jums ir labāks?
- LM358 Divkāršā operatīvā pastiprinātāja visaptveroša rokasgrāmata: PINUTS, ķēdes diagrammas, ekvivalenti, noderīgi piemēri
- CR2032 pret DL2032 pret CR2025 salīdzināšanas rokasgrāmatu
- Izpratne par atšķirībām ESP32 un ESP32-S3 tehniskajā un veiktspējas analīzē
- Detalizēta RC sērijas shēmas analīze
 Izpētīt NRF24L01 komunikācijas mikroshēmas iespējas un lietojumprogrammas
Izpētīt NRF24L01 komunikācijas mikroshēmas iespējas un lietojumprogrammas
2024-04-25
 MMBT3904 NPN tranzistors: tā specifikācijas, visaptverošā lietojumprogrammu rokasgrāmata un MMBT3904 pret MMBT5551
MMBT3904 NPN tranzistors: tā specifikācijas, visaptverošā lietojumprogrammu rokasgrāmata un MMBT3904 pret MMBT5551
2024-04-25
Karstās daļas numurs
 CGA4C2C0G2A221J060AA
CGA4C2C0G2A221J060AA C1608X7R0J225K080AB
C1608X7R0J225K080AB CGA3E2X7R1E104K080AA
CGA3E2X7R1E104K080AA CL21C331JBANNND
CL21C331JBANNND EVK105CH030JW-F
EVK105CH030JW-F 08051A220JAJ2A
08051A220JAJ2A 08051A4R0BAT2A
08051A4R0BAT2A CGA5L3X7R1V225K160AE
CGA5L3X7R1V225K160AE T322B105K035AT
T322B105K035AT F911D336MNC
F911D336MNC
- UTS010E6P
- XW2B-40G4
- EL1508CM
- LFXP2-5E-5FTN256I
- MPC885CVR133
- DS1238S-5
- VI-J71-EZ
- OF104JE
- B32529C0224J189
- T495D476K025AHE250
- 74LVT08AMTC
- ACE24LC04TM+T
- AM85C30-8
- BCM21664TA0IFDBG
- CS53L32AKZZ
- CX20501-12P
- CY505YC56DVT
- IDT74FCT151TSO
- ISL54205IRUZ-T
- LC4032C-75TN-10I
- LE79470JC
- LP8727TMX-B
- M38504M6-220FP
- S71WS256PC0HF3SR0
- SAA7130HL
- TB6564AHAQ
- TMP87CP21BF-3P44
- UPD789407AGK-B27-9EU
- ADC1004S030
- G20N50C
- AD8692WARMZ
- OPA686U/2K5
- TMP47C412AF-VA27
- R2J24000G-A00FP
- MAX1184ECM+
- VI-LU2-EV
- MPM1001/1003AT
- MCP6476T-E/OT
- MS27994-3